Table of Contents
This page has deprecated and moved to the new documentation framework of the main Bitcraze website. Please go to https://www.bitcraze.io/documentation/system/
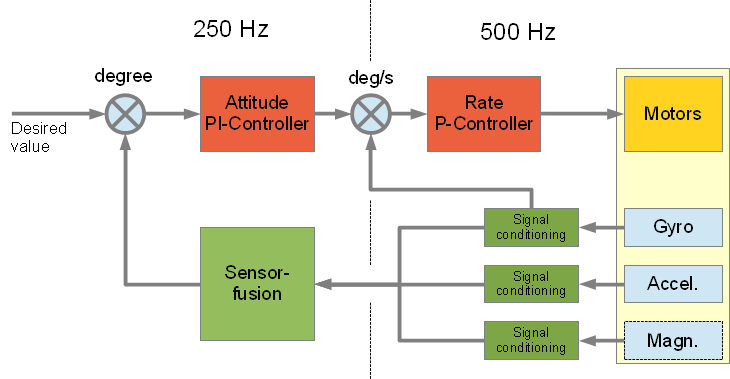
This page is meant as an introduction and overview of the path from sensor acquisition to motor control. In order to understand the details of each of the step the best is to read the code, but it's not trivial to understand the flow. Therefore this should be seen more as a map of where to look in the code to understand, than a complete documentation of each step.

Sensor acquisition
Sensor fusion
Rate- and attitude control