
Products
-
-
- Accessories
- Breakout boards
The Crazyflie Bolt is currently part of our early access program. To better understand what this means also have a look at our Product cycle.
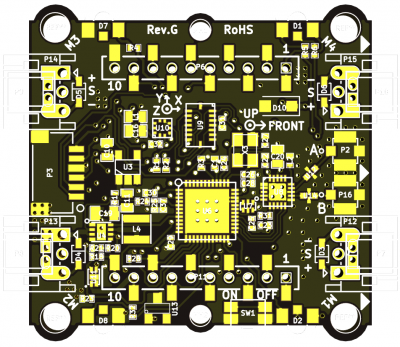
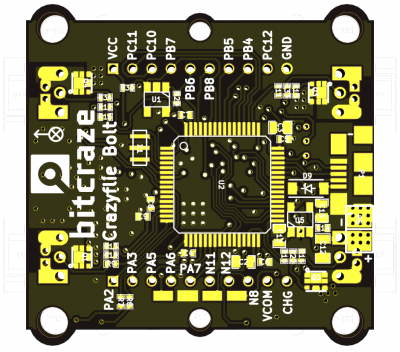
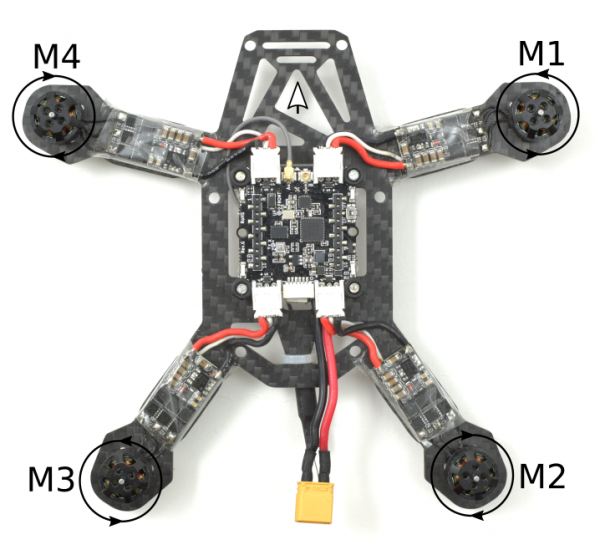
The Crazyflie Bolt is a Crazyflie 2.X compatible flight controller for brushless builds. It is intended to have the strengths of the Crazyflie 2.1, but in a slightly bit bigger package.
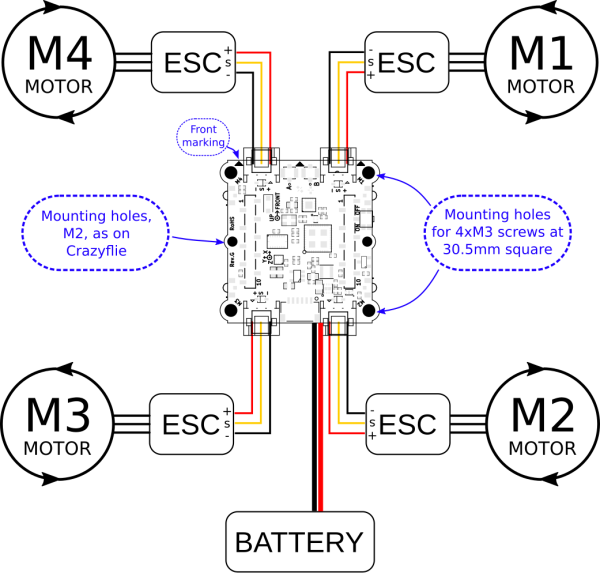
The size of the board is 36mm x 35.4mm and the holes are M3, located at the common 30.5mm square, to fit most frames.
Please see the shop product page for full specification.
The Bolt contains a power distribution board (PDB) but it is a bit limiting. The current has to pass a MOSFET, to be able to switch it off, and also the ESC connector. We have tested running 8A though the chain without any limiting heat-up, but that is as far as we would recommend to go. If additional current is wanted, one could bypass the connectors by soldering the ESC directly to the connector soldering pad. The MOSFET is still there but a slight increase should be possible. For higher currents, an external PDB should be used. Other tricks to keep current down, but power up, is to run on higher voltage (3S or 4S) and using low KV motors.
The Crazyflie firmware will automatically detect that it is running on a Bolt and activate the right modules. However some of the configurations still has to be done during compile time and making them run time configurable is currently work in progress.