
Products
-
-
- Accessories
- Breakout boards
This is an old revision of the document!
This page has details about how to assemble the Crazyflie nano quadcopter kit.
1. Check that you have everything that's needed

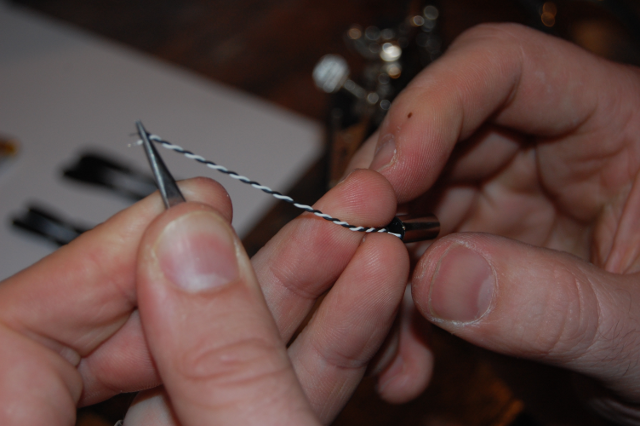
2. Twist the two motor wires together so they are easier to handle

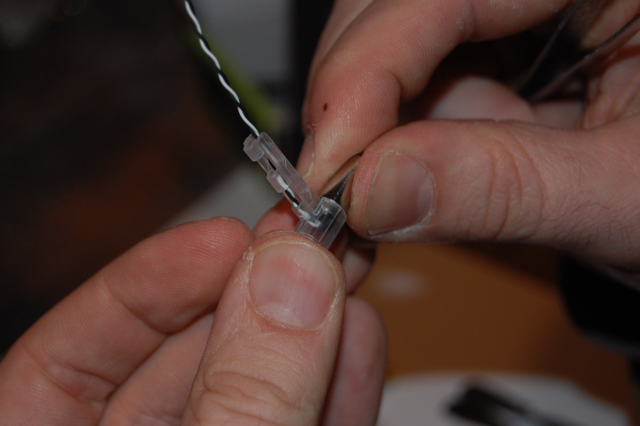
3. Thread the twisted motor wires through the motor mount arm section. I can be a bit tricky so have patience.



4. Insert the motor into the motor mount and be careful to not damage the motor wires while inserting it.
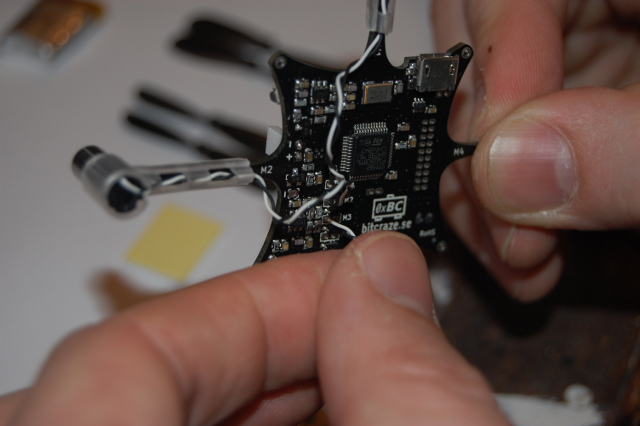
5. Press the motor mount on to the PCB arm. Be careful not to damage the wires when you do it. Start with M1.
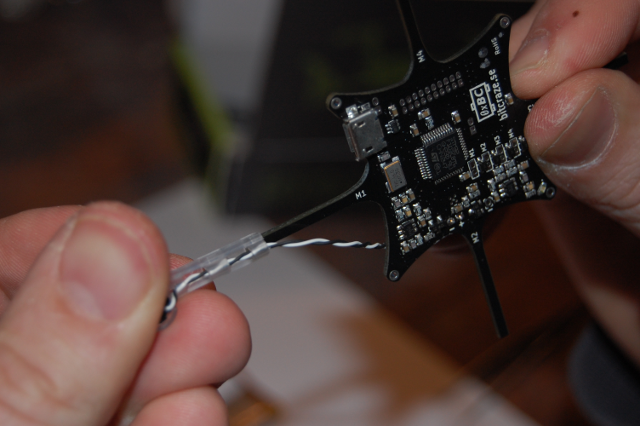
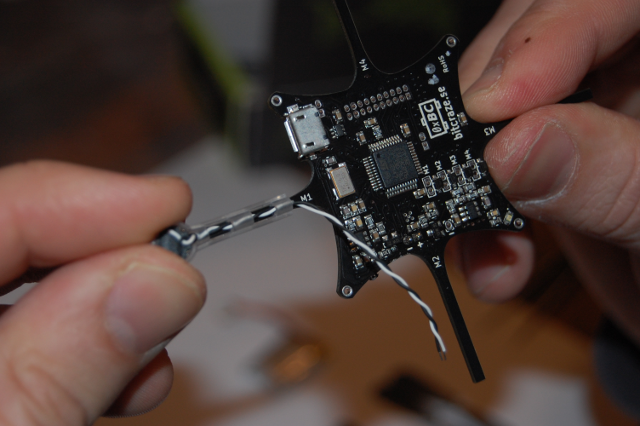
6. Try to attach the peeled end of the motor wire into the motor through hole pad. Start with white wire on round pad on M1.


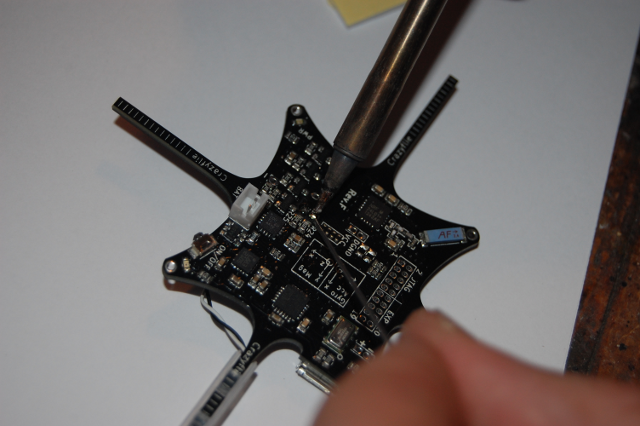
7. Turn the PCB around carefully not removing the wire from the hole and solder it from the top of the PCB. The square pads can take a bit longer to heat up as they are connected to the battery supply copper plane.
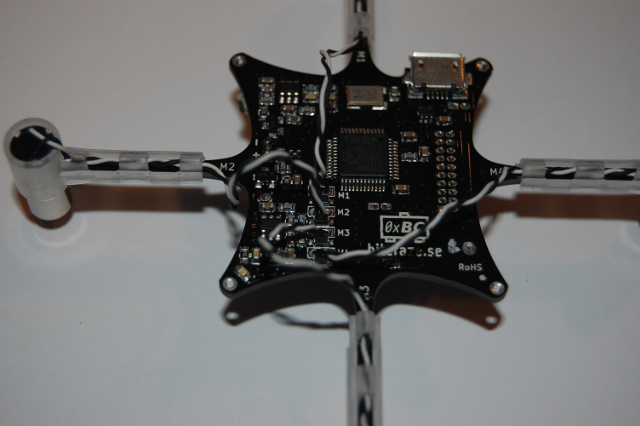
8. Repeat step 2-7 for the rest of the arms M2, M3 and M4.

9. Attach the propellers (see drawings below for mapping). We recommend you sorting out the best propellers. See maximizing performance


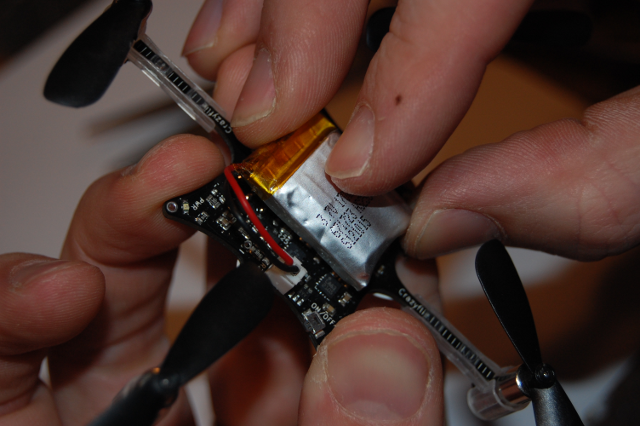
10. Attach the battery and try to centre the weight on the PCB as good as you can.


11. Before you power it on visually inspect your soldering for shorts. After that power on and check that all motors spin during start-up and in the correct direction.

Assembly video using new motor mounts
Old assembly video using 3D printed motor mounts
The following images show how to solder the motors and attach the propellers. The black pads should have the black wire attached and the white pads should have the white wire attached.


")
To get the best performance out of the Crazyflie we recommend you to optimize it. Below you will find some tips
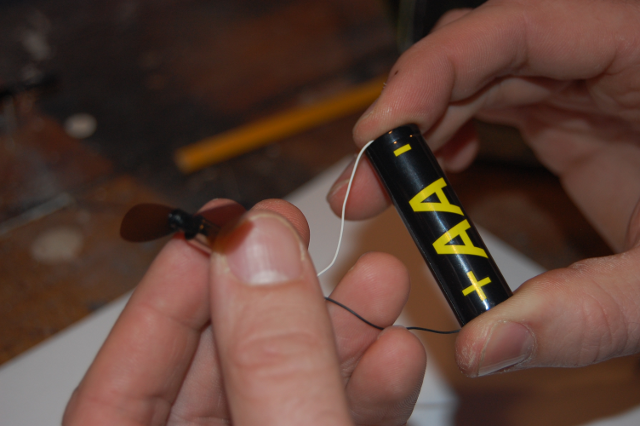 Vibration is one of the biggest reasons the Crazyflie performance is degraded. Vibration effect the gyro and accelerometer measurements making them more noisy and inaccurate. Vibration is mainly caused by unbalanced propellers but can be caused by a bent motor axis as well. Balancing these small propellers is extremely hard and we are still searching for a good way to do it. An easier way to get balanced propellers are to sort them and categorize them according to their vibration. This can easily be done by using the spare motor and a normal 1.5V AA battery to power it while testing each propeller. After this has been done use the propellers with the least vibrations.
Vibration is one of the biggest reasons the Crazyflie performance is degraded. Vibration effect the gyro and accelerometer measurements making them more noisy and inaccurate. Vibration is mainly caused by unbalanced propellers but can be caused by a bent motor axis as well. Balancing these small propellers is extremely hard and we are still searching for a good way to do it. An easier way to get balanced propellers are to sort them and categorize them according to their vibration. This can easily be done by using the spare motor and a normal 1.5V AA battery to power it while testing each propeller. After this has been done use the propellers with the least vibrations.
Getting the centre of mass(CoM) in the centre of the Crazyflie will improve the performance as it means the motors will be equally powered when hovering on one spot. That will give maximum control head room for the stabilization. So when you attach the battery do you best to get the weight centred.
